

Objectif
Comment réaliser l’interface des capteurs analogiques et la commande des pré-actionneurs à commande analogique?
Présentation
Nous avons vu dans l’étude sur les entrées sorties TOR comment gérer les informations TOR (détections et ordres) dans un système automatisé.
Aujourd’hui, nous allons nous intéresser à la gestion des informations analogiques.
- Comment mesurer la température d’un four, la vitesse de déplacement d’un convoyeur, la masse d’un objet…
- Comment piloter un débit d’eau, la vitesse d’un moteur électrique, la température d’un four etc.
Grandeurs analogiques
Introduction
L’API traite des données numériques (suite de 1 et de 0). Par exemple, si on mesure une température, il peut faire 0101 0111 1010 1000 ou 1000 0000 0101 0111. L’information est codée dans ce cas sur 16 bits. Avec le même principe on peut piloter la vanne du bruleur par un ordre de 0011 0010 1111 ou 1010 0111 0011 ici la commande est sur 12 bits.
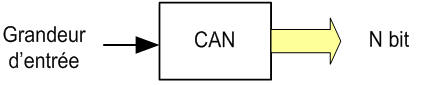
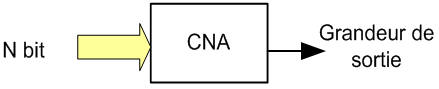
Dans cet exemple la mesure de température est mesurée par un capteur dont le rôle est de convertir une grandeur physique en une grandeur électrique dans notre cas une température en tension. Il faut ensuite convertir cette tension en une grandeur numérique, c’est le Convertisseur Analogique Numérique qui assure cette conversion CAN. Pour piloter la vanne il faut convertir la donnée numérique en analogique, pour cela on utilise un Convertisseur Numérique Analogique CNA.
Nous pouvons résumer tout cela sur un schéma :

Caractéristiques des CNA et CAN
 |  |
- E : Grandeur pleine échelle, c’est la grandeur max à l’entrée d’un CAN ou la sortie d’un CNA. Généralement les grandeurs analogiques sont en courant 4-20 mA ou 0-20 mA ou en tension 0-10 V ou -10+10V.
- N : Résolution du convertisseur, c’est le nombre de bits de la sortie numérique du CAN ou de l’entrée du CNA
- De ces deux grandeurs on peut déterminer le quantum : c’est la plus petite grandeur mesurable.
| \( q = \frac{E}{2^N} \) | q : quantum
E : grandeur pleine échelle |
On vous demande de déterminer le quantum des cas suivant
- Entrée 0-10 V, résolution 10 bits
- Entrée 4-20 mA, résolution 12 bits
- Sortie -10/+10V, résolution 16 bits
Nous venons de présenter les caractéristiques principales des convertisseurs, il en existe de nombreuses autres comme la précision, la vitesse, la linéarité etc..

Prenons comme exemple une carte d’entrée sortie analogique de Schneider Electric BMX AMM 0600l .
C’est une carte qui est constituée de 4 entrées analogiques et 2 sorties analogiques. En observant le synoptique de la carte on constate que :
- La carte utilise un seul convertisseur analogique numérique. Le système sélectionne les voies les unes après les autres grâce au multiplexeur. Les entrées fonctionnent en tension ou en courant en fonction du câblage.
- Et dispose de deux sorties analogiques paramétrables en courant ou en tension
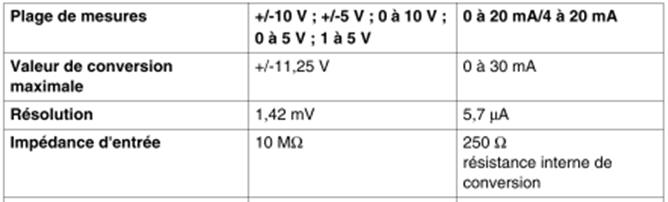
Voici quelques caractéristiques pour les entrées
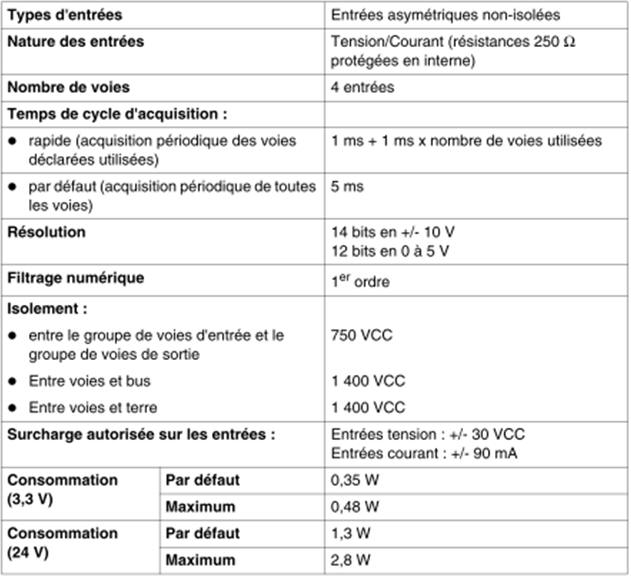
Nous retrouvons ici les deux paramètres qui caractérisent l’entrée analogique : la résolution et la valeur pleine échelle.

Traitement de l’information
Les informations analogiques sont stockées dans des variables entières (INT) par exemple sur 12 bits la variable varie de 20 à 212 -1 ce qui fait 0 à 4095. Dans le traitement de l’information mesurée, on est souvent amené à réaliser des calculs comportant des nombres réels. Il est donc nécessaire de réaliser des conversions d’entier vers réel et inversement :
- INT_TO_REAL réalise la conversion d’entier en réel
- REA_TO_INT réalise la conversion de réel en entier
Voir mise en œuvre
Entrée Analogique
Choix du capteur
Un capteur et un dispositif transformant l’état d’une grandeur physique observée en une grandeur électrique utilisable. Il existe à peu prés autant de capteurs que de grandeurs physiques. Il existe des capteurs de vitesse, force, température, accélération, intensité, son, pression, luminosité, acidité, humidité etc . En résumé il y a toujours une solution à un problème de mesure. Une fois que la technologie du capteur est déterminée, il faut choisir le type de sortie en accord avec la carte analogique de l’API (courant ou tension).
Interface
L’interface entre le capteur et la carte d’entrée est intégrée ou non dans le capteur.
- Interface intégrée : Prenons le cas d’une mesure d’humidité relative Capteur d'humidité . Ce type de capteur est réalisé autour d’un condensateur dont la capacité varie en fonction de l’humidité. L’industriel a intégré au capteur une interface qui transforme la variation de capacité en variation de tension ou courant.

- Interface non intégrée : C’est souvent le cas pour les capteurs de température. Prenons l’exemple d’une sonde platine Pt100. Le principe de ce capteur est de convertir une température en résistance (100 indique 100Ω à 0°c). Il faut ensuite convertir cette résistance en tension (0-10V) ou courant (4-20mA). On réalise cette fonction avec un Conditionneur.
On souhaite réaliser une mesure d’humidité et de température avec le capteur HD 9008 et un API Wago 750-459
- A partir de la doc du capteur déterminer les plages de mesure de l’humidité et de la température.
- A partir de la doc de la carte d’entrée 750-459 déterminer la résolution et quantum de la mesure.
- Déterminer la valeur en binaire et hexadécimale pour une humidité de 48% et une température de 39°c
- Rédiger le schéma des entrées analogique carte 750-459
Schéma
Sur les schémas électriques, prévoir un folio par carte d’entrée.

Sur ce schéma, on remarque que les entrées sont utilisées en courant.
Mise en œuvre
Suivant la disponibilité des systèmes
Mesure de hauteur sur le système contrôleur de parpaing
Réaliser le sous programme de mesure de la hauteur. Résultat dans hauteur en mm
- Configuration de l’API
- Synoptique de la chaîne de transfert de l’information. Préciser le type de capteur.
- Test de l’entrée analogique
- Détermination de la fonction de transfert (voir explication en annexe)
- Écriture test et mise au point du programme.
Mesure du niveau d’eau sur le système Simureg
Réaliser le sous programme de mesure de la hauteur du niveau d’eau de la cuve 1 de Simureg. Résultat dans hauteur en mm
- Configuration de l’API
- Synoptique de la chaîne de transfert de l’information. Préciser le type de capteur.
- Test de l’entrée analogique
- Détermination de la fonction de transfert (voir explication en annexe)
- écriture test et mise au point du programme.
Annexe : Mise à l'échelle

Détermination de la fonction de transfert pour la mise à l’échelle d’un capteur. Prenons l’exemple de la mesure de la hauteur d’eau sur le système Simureg. Pour effectuer cette mesure, on a positionné un capteur de pression sous la cuve. Pour réaliser la mise à l’échelle de ce capteur, il faut pour différents niveaux de remplissage relever la hauteur d’eau et la valeur de la variable de l’entrée analogique (%IW..). Avec ces données, on trace les variations de la hauteur en fonction de %IW puis on en déduit la fonction de transfert.
| H(mm) | %IW |
|---|---|
| H1 | Val1 |
| H2 | Val2 |
La fonction de transfert est de la forme \( H = a.%IW + H0 \)
Avec \( a = \frac{H2 - H1}{(Val2 - Val1} \) et \( H0 = H1 – a.Val1 \)
Prenons un exemple, nous avons défini la fonction de transfert suivante pour une mesure de distance :
\( Distance = (Mesure__Distance * 42,32) – 82,8. \)
Voici à quoi ressemble ce programme sous CodeSys
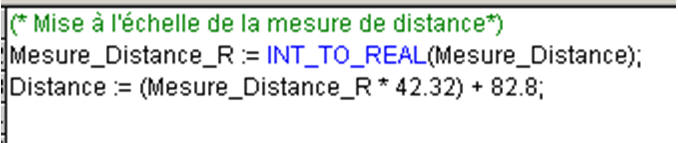
| Définition des variables | Header | Header |
| Nom | Type | Remarque |
| Mesure_Distance | INT | Entrée analogique |
| Mesure_Distance_R | REAL | Conversion de l’entrée analogique en nombre réel |
| Distance | REAL | Résultat |
Sortie Analogique
Choix de l’actionneur
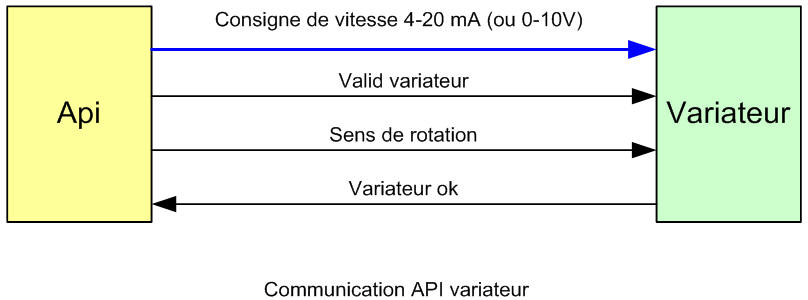
Le choix de l’actionneur à pilotage analogique dépend du process à piloter. Par exemple on peut contrôler un débit avec une vanne à pilotage analogique exemple vanne Siemens. Pour contrôler la fréquence de rotation d’un moteur, on utilise un variateur de vitesse. Pour ce type d’application, on associe à la commande analogique des informations TOR qui permettent de piloter la mise sous tension du variateur, le sens de rotation et de contrôler que le variateur est prêt à fonctionner.
Schéma
Sur les schémas électriques, prévoir un folio par carte d’entrée.

Mise en œuvre
A réaliser sur un des systèmes, suivant la disponibilité.
- Convoyeur Quadra (8)
- Traitement de pièces A71 (23)
- Simureg
Objectif: Piloter le variateur de 0 à 100%
Réaliser le sous programme de pilotage du variateur. La consigne est saisie dans la variable « consigne » avec une valeur comprise entre 0 et 100%
- Analyse du schéma et détermination du protocole de commande du variateur.
- Configuration de l’API
- Programmation et test de validation
- Compte rendu des essais

