Pour un système donné, il s’agit d’améliorer une performance sans nuire aux autres. Par exemple, augmenter la rapidité ou la précision sans rendre le système instable.
Pour cela, on utilise des correcteurs.
Il existe des correcteurs spécifiques calculés pour chaque cas mais il y a aussi des correcteurs classiques.
| type | Proportionnel | Intégral | Dérivé | |||
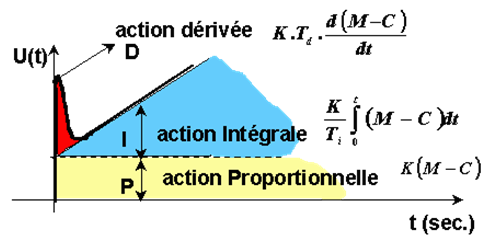
| Grandeur caractéristique ( accessible sur un régulateur) | \( K \) ou \( BP\% \)
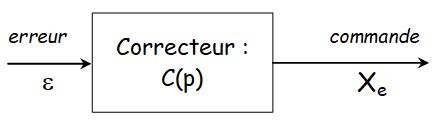
\( Xe \) : commande le processus \( \varepsilon \) : signal d’erreur | \( T_i \)
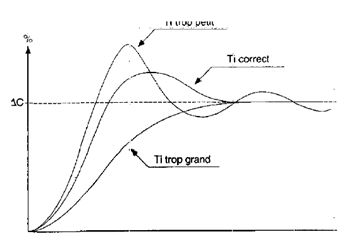
\( T_i \) est d’autant plus grand que l’action intégrale est faible
| \( T_d \)
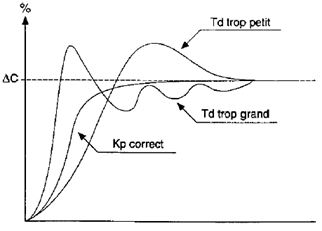
Si l’action dérivée augmente (\( T_d \) grand), la réponse s’accélère !
| |||
| Avantage |
|
|
| |||
| Inconvénient |
|
|
| |||
| Courbes | 
| 
| 
|