

En convention récepteur (moteur)
\( \underline E = - \frac{{d \underline \phi}}{{dt}} = - j\omega \underline \phi \)
\( {\underline E_{PN}} = r \underline J + jX \underline J + \underline V \)
\( {C_e} = \frac{{3VJ\cos \varphi }}{{{\Omega _S}}} \)
\( {C_m} = J\frac{{d\Omega }}{{dt}} + {C_r} \)
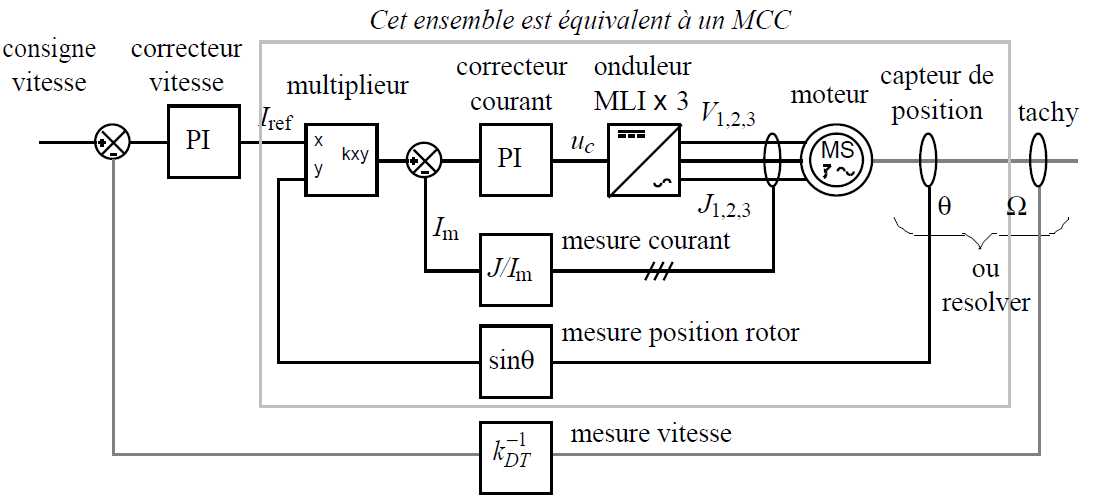
Le moteur est contrôlé comme un MCC par une régulation cascade.
Un capteur de courant permet de générer les ordres de commutation d'un onduleur qui alimente le stator à tension V et fréquence f variables (boucle de régulation interne).
Un capteur de position calé mécaniquement sur le rotor permet de mesurer l'angle \( \theta \), c'est-à-dire la position angulaire du rotor par rapport au champ statorique. Après multiplication, cela permet de contrôler le couple, puisque celui-ci est proportionnel à \( J sin \theta \) .
Cette machine est équivalente à un MCC car l'ensemble {capteurs + onduleur} joue le rôle d'un collecteur mécanique. Vu côté électronique, il possède les mêmes équations electromécaniques :
- Fem et couple : \( E = K \Omega \) et \( C_m = KI \) (avec : I : intensité dans une phase)
- Constante de temps mécanique : \( {\tau _m} = \frac{{rI}}{{{K^2}}} \) (avec : r : résistance entre 2 phases)
- Constante de temps électrique : \( {\tau _m} = \frac{l}{R} \) (avec : l : inductance entre phase)
Il est donc facile d'adjoindre une régulation de vitesse comme sur un MCC, mais avec une précision encore améliorée du fait des propriétés du MS
Voir sujet BTS Électrotechnique 2007 Métropole : Sujet 
 et sa correction
et sa correction

