

\( n = {n_s}(1 - g) = \frac{{f(1 - g)}}{p} \)
Sur un rotor bobiné ou à bagues:
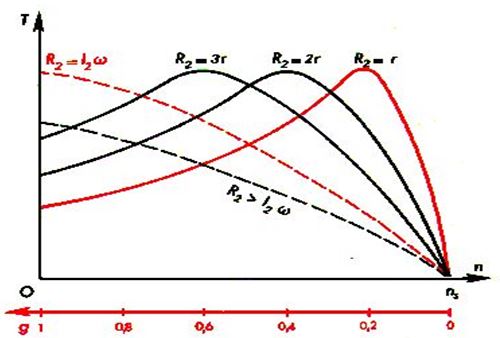
En modifiant la résistance rotorique, on agit sur le glissement tout en conservant un couple maximal constant. Cela implique d ’avoir une machine à rotor bobiné.

- Le démarrage se fait par insertion en série avec les enroulements du rotor, un rhéostat à plots triphasé monté en étoile.
- Sur le premier plot, la résistance R2 est telle que le couple est maximum pour \( g = 1 \), et ensuite quand la vitesse augmente on change le plot de façon que le couple varie toujours entre le couple nominal et le couple maximal.
- Une autre solution électronique, c'est à partir de montage à thyristor : c'est un hacheur rotorique donnant une "résistance" variable "R2" réglable par thyristor.
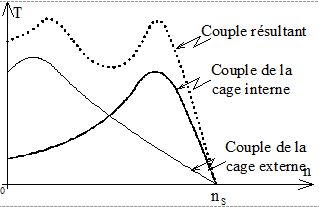
Sur un rotor à double cage d'écureuil ou à encoches profondes:
- Ces moteurs sont plus faciles à démarrer que pour le rotor bobiné.
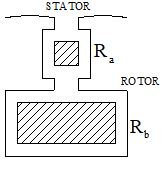
- Le rotor est constitué de deux cages de résistances Ra et Rb (Rb << Ra).
- Au démarrage presque tout le courant passe dans la cage (Ra), la plus proche de l'entrefer. La résistance du rotor correspond donc à la section de la barre extérieure au moment du démarrage et à la somme des deux sections lorsque la période de démarrage est achevée. Tout se passe comme si la résistance du rotor diminuant au cours du démarrage ; donc même effet qu'avec l'utilisation d'un rhéostat
- Remarque
- On peut aussi remplacer les deux barres par une barre unique s'enfonçant profondément dans le fer. C'est ce qu'on appelle : le moteur à encoches profondes.
Nombre depôles variable : moteur Dalhander ou moteur part winding
Le couplage Dahlander permet un rapport de nombre de paires de pôles de 1 : 2.
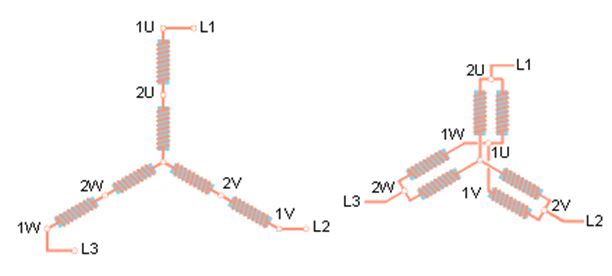
Commutation des raccordements des moteurs Dahlander : raccordement en série (petite vitesse), raccordement en parallèle (grande vitesse).

