Conversion électromécanique du moteur asynchrone
Le moteur asynchrone convertit une puissance électrique en puissance mécanique.
La puissance électrique est sous forme alternative donc la puissance absorbée sera de la forme \( P_{abs} = \sqrt{3} U I cos \varphi \) et la puissance mécanique \( P_{u} = C \cdot \Omega \) où:
- Le courant \( I \) sera d'autant plus important que le couple mécanique \( C \) demandé est important
- Contrairement au moteur à courant continu où la tension \( U \) impose la vitesse du moteur, ici c'est davantage la fréquence \( f \) de la tension U qui impose la vitesse de rotation \( \omega \)

Le stator crée le champ tournant inducteur
Les bobinages du stator alimentés en triphasé créent un champ tournant (tournant à la vitesse dite de synchronisme \( n_s \)). Il crée le champ inducteur. Le stator est donc l'inducteur.
| Moteur asynchrone (Alain Jeanneaux) vidéo 1/4 (12'19") |
| https://youtu.be/hUJbCE61Yk4 |
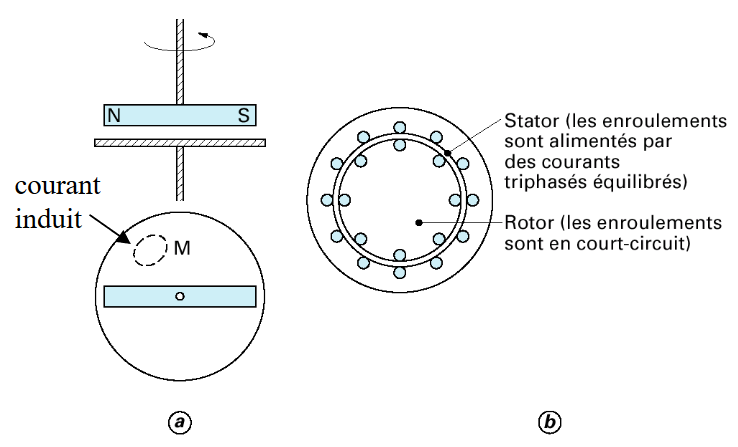
Le rotor percevant le champ tournant est le siège de courants induits
Le champ tournant induit dans le rotor des courants de Foucault qui s’opposent à la cause qui les a engendrés c’est à dire la variation du champ magnétique.
Les enroulements du rotor du moteur asynchrone étant court-circuités (en étoile ou triangle) ils sont donc le siège de courants induits. Ces courants créent à leur tour un champ magnétique dans le rotor qui tend à s’aligner avec celui du stator, mais ne peut tourner à la même vitesse que le champ tournant du stator.
Le rotor doit tourner à une vitesse différente du champ tournant

| 
| 
|
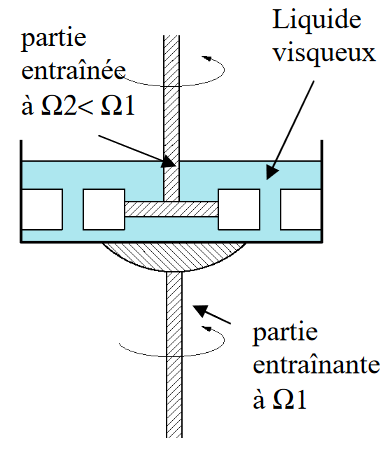
Si le rotor tournait à la même vitesse que le champ tournant créé par le stator, le rotor ne verrait pas de variation de champ magnétique et les courants induits disparaîtraient.
C’est pourquoi le rotor tourne forcément à une vitesse \( n) \) différente du champ tournant \( n_s) \) d’où le nom de moteur asynchrone (asynchrone : préfixe a signifiant l'absence et synchrone signifiant en même temps donc asynchrone : rotor ne tourne pas à la même vitesse que le champ tournant).
Le coefficient de glissement g quantifie cette différence de vitesse mise en rapport de la vitesse de synchronisme.
| \( g=\frac{n_S -n}{n_S} \) |
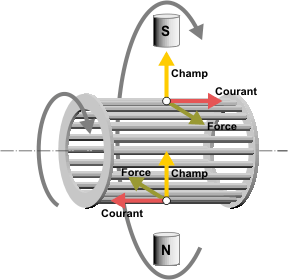
Schématisation des forces sur l'inducteur